2000����Ǻ�����ǽ�ʽ��Ĺ�ư���ܥåȡ�HeRo 2.0��



��ǯ�����̤Υ��ܥåȤ�ߤ����̿���������Ū�˱�ä���ư���餻��֥������ܥƥ������פȸƤФ�뵻�Ѥγ�ȯ���ʤ�Ǥ��ޤ����������ܥƥ������ˤϡ����̤Υ��ܥåȤ��Ѱդ���Τ�¿������Ѥ�������פȤ�����������¸�ߤ��Ƥ��ޤ�����������1��������18.72�ɥ�(��2400��)�ǽ�����ǽ�ʰ²��ʥ��ܥåȡ�HeRo 2.0�פ�ȯɽ����ޤ�����
[2202.12391] HeRo 2.0: A Low-Cost Robot for Swarm Robotics Research
HeRo 2.0, an ultra-low cost 3D-printed robotics platform, could open swarm robotics experimentation up to all
https://www.wevolver.com/article/hero-20-an-ultra-low-cost-3d-printed-robotics-platform-could-open-swarm-robotics-experimentation-up-to-all
�������ܥƥ������ϥ��ܥå�Ʊ�Τ˸ߤ��ΰ��ִط����İ������뤳�Ȥ����̤Υ��ܥåȤ�1�Ĥη���Ȥ��ư�դ���Ū�˱�ä�ư�������ѤǤ������Υ������ܥƥ������ϡ�ŷ���δƻ�ס�����ȥǡ����μ����סֱ���õ���פʤ�¿�������Ӥ˳��ѤǤ���ȴ��Ԥ���Ƥ��ꡢ������Ǹ��椬�ʤ���Ƥޤ����ʲ��ε����Ǥϡ��������ܥƥ������ˤ�äƥ��ܥåȤΰ�ư�����椹���ͻҤ��ǧ�Ǥ��ޤ���
�ߤ����̿����ʤ���������Ū�˱�ä���ư�뽸�Ĺ�ư���ܡ�Kilobot�� - GIGAZINE

�������ܥƥ������θ����Ԥ��ˤ����̤Υ��ܥåȤ��Ѱդ���ɬ�פ����뤿�ᡢ���ܥåȤ�������륳���Ȥι⤵�����泫ȯ�ξ㳲�ȤʤäƤ��ޤ������ߥʥ��������饤��Ϣˮ��ؤθ�������ब��ȯ�����������ܥƥ������ѥ��ܥåȡ�HeRo 2.0�פ����ʤ��߷ޤ䥽�եȥ������Υ����������ɤ���������Ƥ��ꡢ1��������18.72�ɥ�Ȥ�������ޤǤΥ��ܥåȤ���٤ư²��ʲ��ʤ�¸����Ƥ��ޤ���

�ºݤ��Ȥ�Ω�Ƥ�줿��HeRo 2.0�פ��ʲ������Υ��С���ۥ�����ʤ�¿�������ʤ�3D�ץ���Ǻ���Ƥ��ޤ���
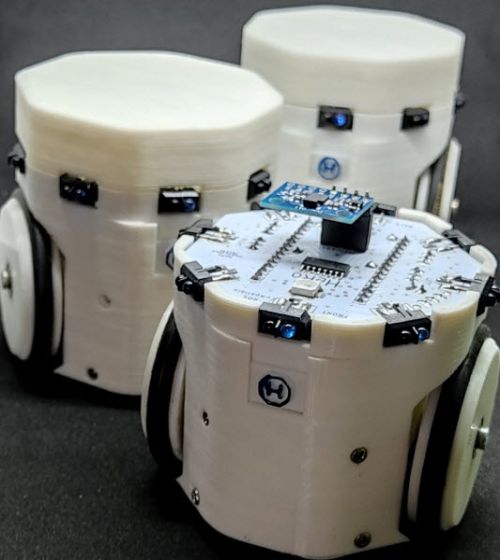
���������ˤ��ȡ���HeRo 2.0�פϡ֥��������������סָߤ��ΰ��־�����Τ��Ĥ�3����ư���ǽ�סִ�ñ������Ǥ����Ǻ�Ǻ�����ǽ�ס־㳲ʪ���Ф���⤤�����פȤ��ä��������ܥƥ������ѤΥ��ܥåȤȤ��ƽ�ʬ����ǽ����äƤ���ȤΤ��ȡ��ޤ���ư���ɬ�פʥ��եȥ������������ץ����dz�ȯ����Ƥ��ꡢ�Żҹ���ȳ��ǹ����Ѥ����Ƥ��볫ȯ���եȥ�����Arduino IDE���Ѥ����ȼ��ε�ǽ���ɲäǤ��ޤ���
��HeRo 2.0�פΥѡ��Ĥˤ�3D�ץ����¿�Ѥ���Ƥ��뤿������ʤ��ʼ��˥Х�Ĥ�������ס�Ĺ����ư����������ѵ���������פȤ��ä����꤬¸�ߤ��ޤ������Τ��ᡢ�����������ʼ��ΥХ�Ĥ����ޤ����߷פ����ʤ��ѵ�ʤɤ�³����ͽ��ȤΤ��ȤǤ���
