SpaceXの新型ロケット「スターシップ」の着陸軌道を正確に再現するソフトウェアが開発される


イーロン・マスクCEOが率いる民間宇宙企業のSpaceXは、新型宇宙船「スターシップ」を開発中です。プログラマーのトーマス・ゴッデン氏はスターシップの着陸時の軌道を再現するソフトウェアを開発し、その手法を解説しています。
StarshipTrajOpt.ipynb - Colaboratory
https://colab.research.google.com/drive/18MVtu4reVJLBE1RXByQEmu0O9aLXlMHz
https://thomas-godden.medium.com/how-spacex-lands-starship-sort-of-ee96cdde650b
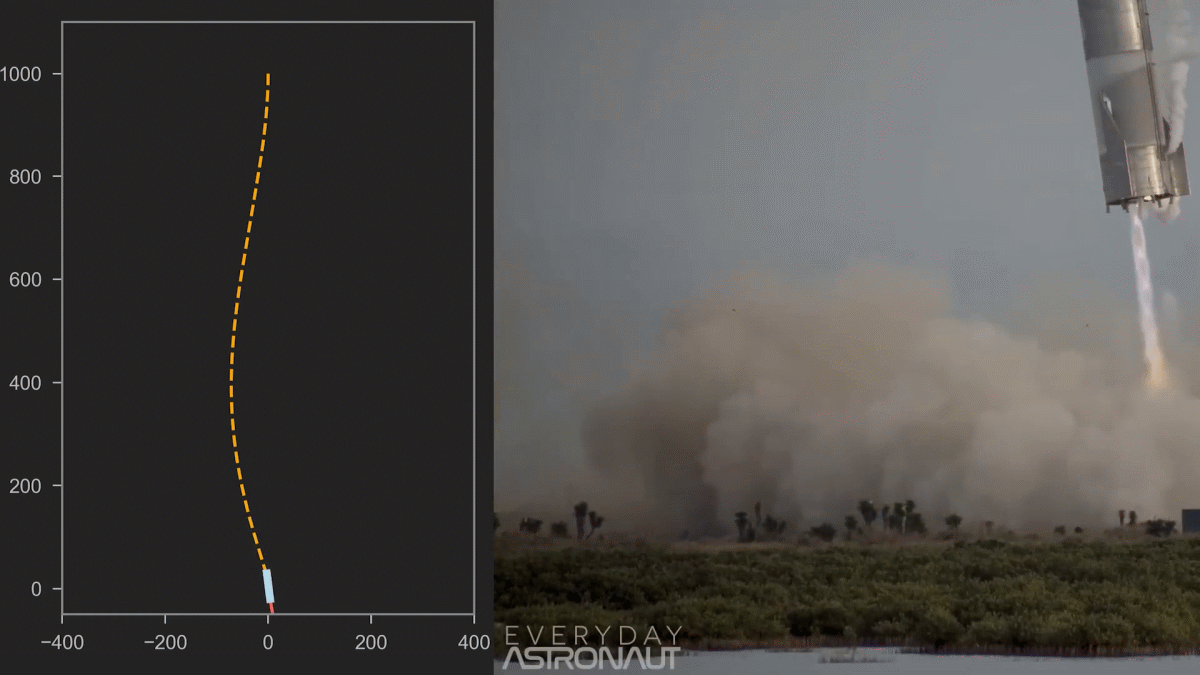
以下のムービーでは、ゴッデン氏が作成したソフトウェアによるスターシップの着陸軌道の再現アニメーションを確認できます。ムービーを見ると、ゴッデン氏が開発したソフトウェアによる軌道再現精度の高さが分かります。
Starship Landing Trajectory Optimization - YouTube
ゴッデン氏はソフトウェアのコードを解説する前に、「最適軌道」に関する考え方を解説しています。ゴッデン氏によると、ここでの「最適」とは「最良」や「理想」といった意味を持っているとのこと。例えば、以下の丸印から星印まで移動する際は、左側に記されているように一直線に進むのが最適な軌道です。

一直線に進むのが最適な軌道であることは直感的に理解できますが、ソフトウェアで軌道を求める際は、さまざまな「コスト」が最小になるように軌道を求める必要があります。丸印から星印までの軌道をソフトウェアがで求める場合は、「距離」というコストが最小になる軌道を探索させることで、「一直線に進む」という軌道を求めることができます。

しかし、現実世界でロケットの軌道を求める際は、距離以外にも多様なコストが存在します。例えば、スタート地点から目的地点へ直線で向かう際に、通過に多大なコストが必要なエリアが存在する場合、距離だけを指標とするソフトウェアでは一直線に進むルートを最適な軌道として提示するため、大きなコストが必要となってしまいます。

そこで、ゴッデン氏は道を1歩ずつ進むごとに必要なコストを評価し、常に少ないコストで進むことができる軌道を探索することにしました。これにより、大きなコストがかかるエリアを避けて軌道を求めることができるソフトウェアの開発が可能になりました。

ゴッデン氏は上記の考え方から、スターシップの進路と制御状態を0.04秒ごとに評価することで「スターシップの最適軌道」を導き出すソフトウェアを開発。開発されたソフトウェアでは、冒頭のムービーの通りにスターシップの実際の軌道とほとんど同じ軌道を求めることに成功しています。
ゴッデン氏は「今回開発したソフトウェアによって、スターシップの着陸軌道を求めることに成功しました。しかし、実際の着陸では着陸軌道の通りにスターシップを制御する必要があります」と述べ、スターシップの着陸には高度な技術が必要であることを強調しています。
