
スニーカーを履いた人型ロボットがゴビ砂漠を走るムービーを中国のロボット企業が公開


中国の清華大学などの研究者らが2023年8月に設立したロボット開発企業・Robot Eraが、スニーカーを履いたヒューマノイドロボット「STAR1」がゴビ砂漠を走る映像を公開しました。STAR1の最高時速は8マイル(約12.9km)とのことで、スニーカーを履いた状態ではあるものの、2024年3月にUnitreeのヒューマノイドロボット「Unitree H1」が記録した時速7.4マイル(約11.9km)を上回っています。
Watch: Sneaker-wearing humanoid beats barefoot bot on Gobi fun run
https://newatlas.com/ai-humanoids/robot-era-star1-humanoid-gobi/
Chinese scientists build fastest humanoid robot in the world - it can run at 8 mph | Live Science
https://www.livescience.com/technology/robotics/chinese-scientists-build-fastest-humanoid-robot-in-the-world-watch-it-run-across-the-gobi-desert
Robot Eraが開発したSTAR1は身長5フィート7インチ(約171cm)、重量143ポンド(約65kg)と、ほぼ人間と同じサイズと重さの二足歩行ロボットです。

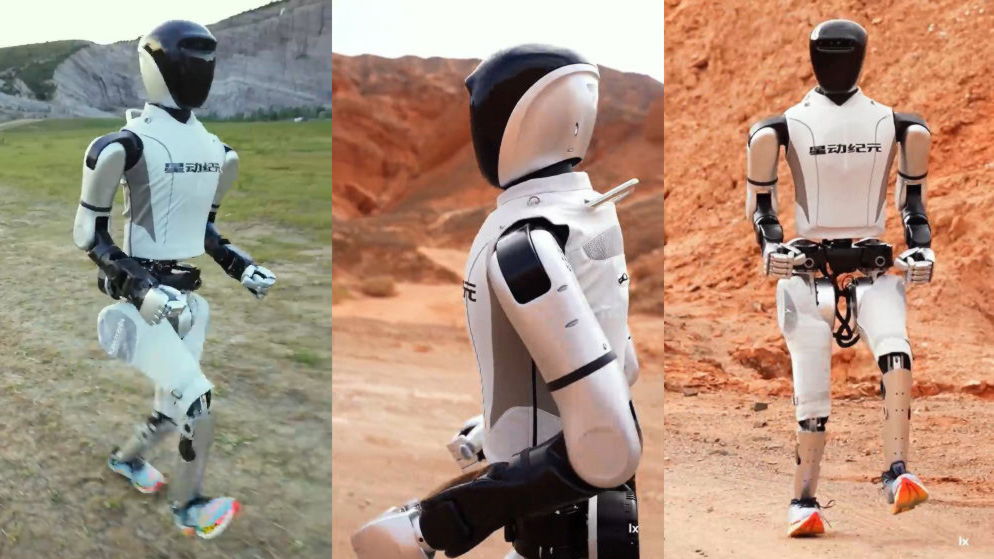
Robot Eraが2024年9月に撮影したというデモムービーでは、ゴビ砂漠の砂地や草原、舗装路を走るSTAR1の様子を見ることができます。

人間と同じようなスニーカーを履き、砂地の斜面を難なく走るSTAR1。

UnitreeのUnitree H1は走行中に両足が地面を離れた瞬間はなかったとのことで、厳密には「走った」とは言えない部分がありました。一方でSTAR1は完全に両足が地面を離れる瞬間もありました。

ゴビ砂漠の中をはだしで走るSTAR1。走行姿勢はやや独特で、背中は上方向にまっすぐ伸ばしたまま、両足を前に突き出して進んでいます。

STAR1には精密遊星減速機や高精度エンコーダー、ドライバーなどを含む400Nm(ニュートンメートル)のトルクを持つ関節モーターや、高速通信モジュールなどが搭載されています。

Robot Eraは、「ロボットの四肢と動的重心を制御することは、起伏の多い地形での自律的な移動を可能にするために不可欠です。たとえば、丹霞のような地形に見られる柔らかい路面や凹凸のある路面を移動するには、衝撃を吸収し、路面の凹凸に適応できる柔軟で適応性のある関節が必要です。逆に固い路面を走る場合は、安定性のために関節をしっかりと制御する必要があり、ロボットはスムーズな動きと転倒防止のために関節の硬さや柔軟性を調節しなくてはなりません」と説明しています。

Robot Eraはデモムービーの中で、2台のSTAR1を用意してそれぞれ「はだしの状態」と「スニーカーを履いた状態」でゴビ砂漠を走らせました。

スニーカーを履いたSTAR1ははだしのSTAR1よりも速く、最高時速8マイルのスピードで34分間走り続けたとのこと。

STAR1には最大275TOPSの処理能力を持つAIコンピューティングも搭載されています。これは、「Copilot+ PC」として売り出されているWindowsのAI向けノートPCよりも高性能です。

STAR1はAIと大規模言語モデルを統合することにより、エンドツーエンドのニューラルネットワークで訓練されているため、新しいスキルを迅速に学習し、さまざまなタスクに適応するとのこと。Robot Eraは、「この汎用性により、道路・草地・砂漠・凹凸のある表面などまざまな地形に直面しても、走る・歩く・ジャンプするという3つの歩行モードを切り替えることができます」と述べました。






