
Googleがロボットアームに「靴ひもを結ぶ」「別のロボットを修理」などの難しいタスクを学習させる手法を発表


GoogleのAI研究部門であるGoogle DeepMindが、ロボットアームに複雑なタスクを学習させる手法を発表しました。発表された手法は人間の操作から学習する「ALOHA Unleashed」と物理シミュレーターでの学習をベースにした「DemoStart」の2種類で、それぞれ異なる手法でロボットアームにタスクを学習させられます。
Our latest advances in robot dexterity - Google DeepMind
◆ALOHA Unleashed
ALOHA UnleashedはGoogle DeepMindやスタンフォード大学が共同開発した2本腕の高性能ロボットアーム「ALOHA 2」を対象に開発された学習手法です。

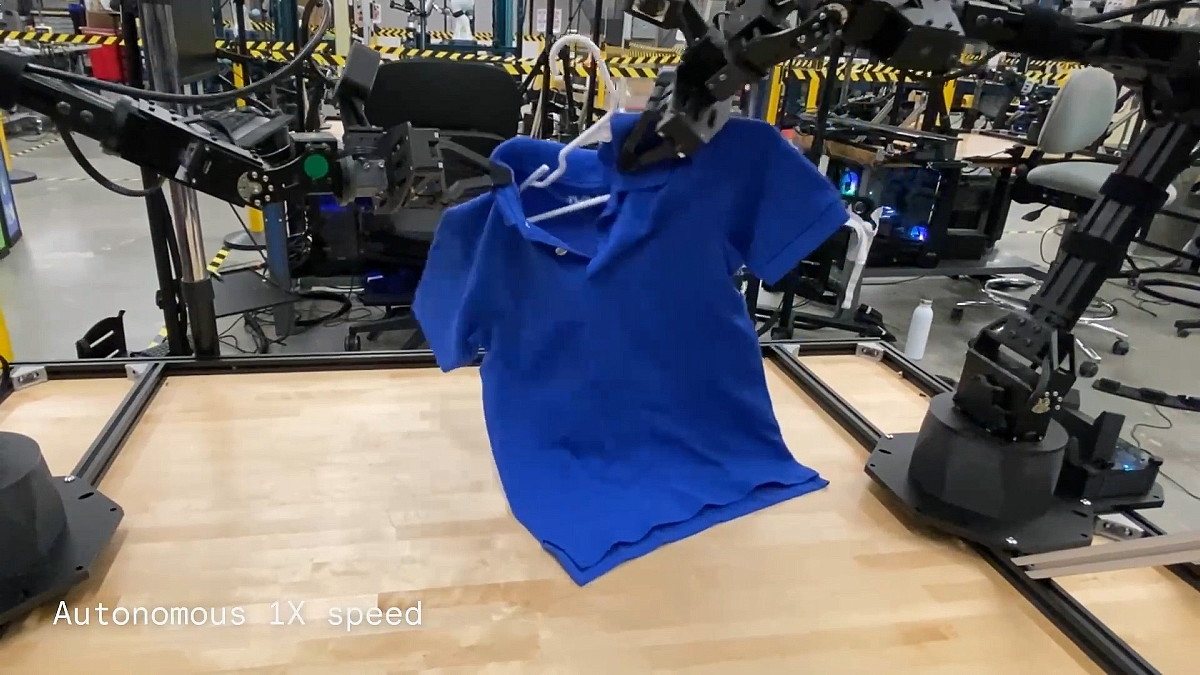
ALOHA UnleashedはTransformerをベースとしており、画像生成AIなどに使われる拡散モデルを活用することで「人間の操作を元に、タスクの解決方法を学習する」という学習フローを実現しています。これにより、人間による遠隔操作から「靴ひもを結ぶ」「他のロボットを修理する」「シャツをハンガーにかける」といった複雑な操作を学習できます。
ALOHA 2がALOHA Unleashedを用いて学習した「靴ひもを結ぶ」という操作を実行する様子が以下。画像をクリックすると動画を確認できます。

「他のロボットの部品を交換する」という操作も可能です。

ALOHA Unleashedの論文は以下のリンク先で公開されています。
ALOHA Unleashed: A Simple Recipe for Robot Dexterity
(PDFファイル)https://aloha-unleashed.github.io/assets/aloha_unleashed.pdf

◆DemoStart
ロボットアームには多数の可動部品やセンサーが搭載されており、高性能なロボットアームほど操作が複雑になります。このため、ロボットアームに自動操作を学習させるためには長い時間と多くの費用が必要です。DemoStartは「ロボットアームの学習を物理シミュレーター内で実行する」というアプローチを採用した学習手法で、学習にかかる時間と費用を節約できます。
DemoStartでは、物理エンジン「MuJoCo」内にロボットアームの部品やタスクを再現して学習を実行します。物理シミュレーションと現実世界には多少のギャップが存在しますが、DemoStartではギャップを埋めるためのカリキュラムを自動生成して物理シミュレーションでの学習結果をスムーズに現実世界での動作に反映できます。

GoogleはすでにShadow Robot製のロボットアーム「DEX-EE」を使ってDemoStartをテスト済みとのことです。

DemoStartの論文は以下のリンク先で公開されています。
DemoStart: Demonstration-led auto-curriculum applied to sim-to-real with multi-fingered robots
(PDFファイル)https://arxiv.org/pdf/2409.06613






