
旋回やジャンプも自由自在なオープンソースの四足歩行ロボット「Stanford Pupper」を実際に組み立てられる詳細な説明書が公開


スタンフォード大学の研究チームが小型四足歩行ロボット「Stanford Pupper」の製作に必要なパーツやソフトウェアなどを公開して、自作方法を詳しく解説しています。
Pupper - Stanford Student Robotics
https://stanfordstudentrobotics.org/pupper
Stanford Pupper - Google ドキュメント
以下のムービーを見ると、Stanford Pupperがどんなロボットなのかがすぐに理解できます。
Stanford Pupper - YouTube
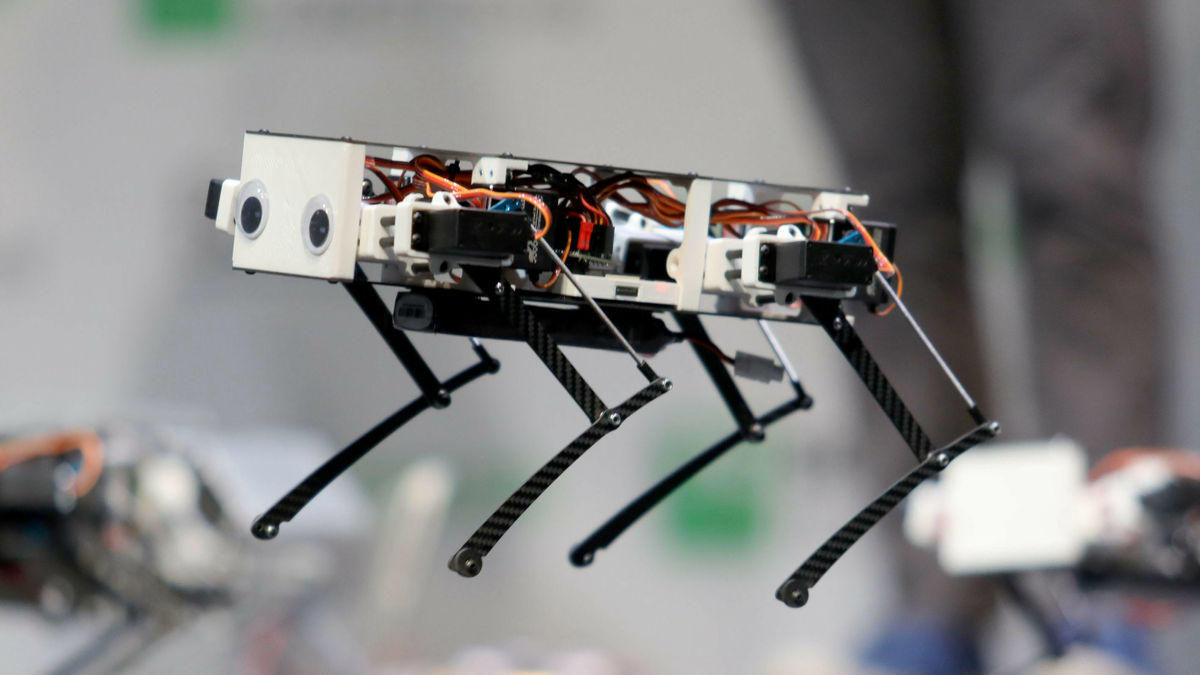
Stanford Pupperは、首のない犬のような四足歩行のロボット。弧を描くような移動や……


バック走。


脚部を器用に動かしてその場での旋回も可能。


脚部を曲げて、伏せてからの……


ジャンプもできます。

特定の足だけを曲げて、体を斜めにひねる動作も可能。


Stanford Pupperは自作することを前提にしたロボットです。組み立て用パーツにかかる総額は600ドル(約6万4000円)から900ドル(約9万6000円)程度で、基盤となるRaspberry Piや操作に必要なPlayStation 4専用コントローラーのDUALSHOCK 4などをすでに持っている場合はその分だけ必要な費用は少なくなります。製作時間は専門知識の有無によって変動し、おおよそ4〜10時間ほど。製作難易度は「小型のクアッドコプタードローンを作るレベル」とのことです。
Stanford Pupperの製作に必要な各パーツは、以下のスプレッドシートに詳しくまとめられています。「Category」には、Body(胴部)など「どの部分に必要なパーツなのか」が記載されており、「Description」にはパーツの製品名が、「Link / McMaster # / Vendor」には当該パーツが購入できる通販サイトへのリンクや型番が記されています。
JX Pupper BOM - Google スプレッドシート
https://docs.google.com/spreadsheets/d/1zZ2e00XdzA7zwb35Ly_HdzfDJcsxMIR_5vjwnf-KW70/edit#gid=1141991382

「Link / McMaster # / Vendor」の項目に記載がないものは、一般販売されていないパーツ。3Dプリンターで出力するか、以下から購入する必要があり、95ドル(約1万円)かかります。
Stanford Pupper Robot Carbon Fiber Parts - Plastic-Spider
https://great3d.com/stanford-pupper-robot-carbon-fiber-parts/

組み立て説明書は「Hip(脚部)」「Body(胴部)」「PCB(分電盤)」の3部に分かれており、それぞれ事細かに説明されています。
Hip Assembly - Google ドキュメント
https://docs.google.com/document/d/1q-gAl5f5Jf3FpqBS3S7KLYmJK8pqScrbSuiDyUNBz_Q/

Pupper Body Assembly - Google ドキュメント
https://docs.google.com/document/d/17fdzvwpjtqxSz1pGHZ9alKclC0lZnAiOoYe-dWSYFus/

Stanford Pupper PCB Assembly - Google ドキュメント
https://docs.google.com/document/d/1dHCywVy-AITTzERyaq0_-DolPpvKBlEALdpsy_sTffg/

組み立てを実演するムービーもYouTube上で公開されており、視覚的に組み立て方を学ぶことも可能。
Stanford Pupper Hip Assembly - YouTube
ソースコードやインストール方法などはGitHub上で詳しく解説されています。
GitHub - stanfordroboticsclub/StanfordQuadruped
https://github.com/stanfordroboticsclub/StanfordQuadruped






