
自作のヒト型ロボットを操縦してレスキュー能力を競う「ヒト型レスキューロボットコンテスト」を観戦してきた、要救護者への衝撃を抑えるモーションや操作技術が光る


自作の人型二足歩行ロボットを操縦してレスキュー活動能力を競う「ヒト型レスキューロボットコンテスト」が2024年11月3日(日)に大阪電気通信大学の寝屋川キャンパスで開催されました。コンテストでは「レスキューの速さ」だけでなく「要救護者に与える衝撃を抑える」という点も重要視しているとのこと。いったいどんなロボットたちが登場するのか気になったので、実際に会場を訪れて観戦してきました。
https://humanoid-rescon.org/?page_id=10275
ヒト型レスキューロボットコンテストが実施される大阪電気通信大学の寝屋川キャンパスに到着。

会場のポスターには「レスキュー未来型」と記載されています。

レスキュー能力を競う競技フィールドはこんな感じ。コの字型のステージに「下をくぐるトンネル」「上を乗り越える段差」「要救護者が待つベッド」が設置されています。

トンネルはこんな感じ。どのようなモーションでくぐるかは選手の判断に委ねられています。

これが乗り越える必要のある段差。段差の乗り越え方も選手によって異なります。

要救護者は人型のデッサン人形です。

デッサン人形の背面には加速度センサーが埋め込まれており、衝撃や傾きを検知できるようになっています。

コンテストでは速さだけでなく、要救護者に与える衝撃や傾きの大きさも評価対象となります。例えば、以下のように頭が下を向いてしまうと「傾き値」がたまり、減点対象となります。

衝撃値と傾き値は会場内のモニターにリアルタイムで表示されます。どれだけ衝撃を与えずに優しく救護できるかが見どころというわけです。

競技の一連の流れを記録した動画が以下。競技者は大阪電気通信大学自由工房HRP所属のミヤギナツキ氏で、ロボット名は「アラネア」です。
ヒト型レスキューロボットコンテストの競技の様子 - YouTube
まずはスタート直後にトンネルくぐり。ほふく前進などの姿勢を低くする移動方法が求められます。

段差乗り越えでは腕や脚を駆使することが求められます。アラネアは側転のような動きでクリアしていました。

続いて、要救護者の周囲にあるガレキを除去します。ガレキを除去する際にベッドに当たると衝撃値が加算されてしまうため、細かい操縦技術が求められます。

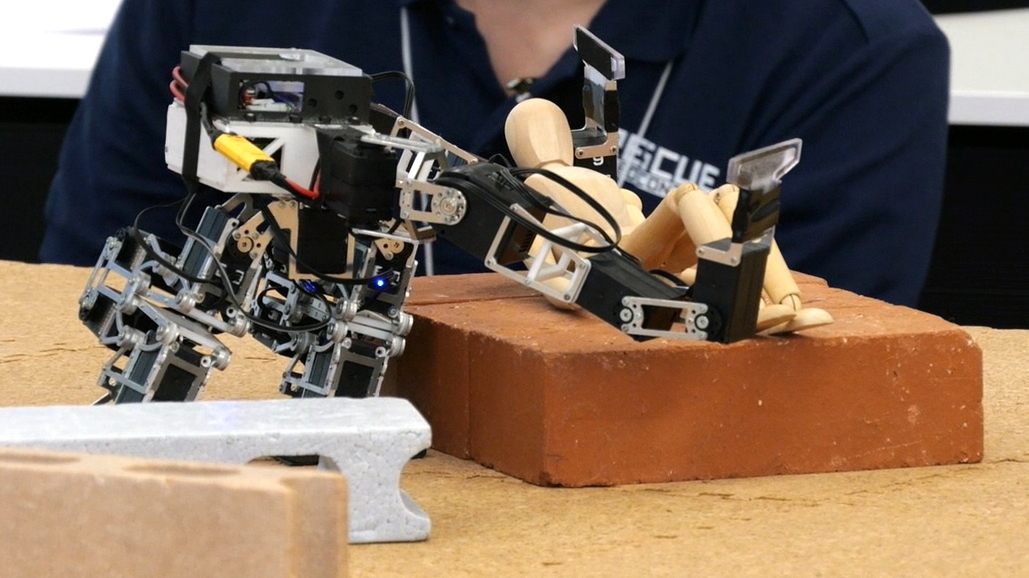
ガレキを撤去したら、要救護者を優しく持ち上げます。「要救護者との距離調整」「腕の動きのコントロール」「衝撃を抑えるモーション」などの見どころ満載のポイントです。

最後に要救護者をゴールまで運べば競技終了です。ゴールまで運ぶ段階でも衝撃値は加算され続けるため、スムーズな移動方法が求められます。

「ヒト型レスキューロボットコンテスト」は「目視部門」と「搭載カメラ部門」に分かれており、搭載カメラ部門では上記の操作を「ロボットに搭載したカメラの映像」だけを頼りに実行する必要があります。

2024年のヒト型レスキューロボットコンテストには合計13台のロボットが出場しており、好成績を記録した6台のロボットがファイナルミッションに進みました。ファイナルステージの競技内容や結果は、以下の記事にまとめいています。
「ヒト型レスキューロボットコンテスト」のファイナルステージに進出したロボット全種まとめ、「コケーッ」と鳴くロボットや全力パンチロボットなど個性派ぞろい - GIGAZINE






