
ロボットアームで福島第一原発の原子炉からどうやって核燃料デブリを取り出すのか


2011年3月11日に発生した東日本大震災による津波で、福島第一原子力発電所の電源が喪失し、3つの原子炉が同時にメルトダウンを起こす事故が起こりました。運営会社の東京電力はロボットアームを用いて原子炉から溶融した核燃料デブリを取り出す計画を進めています。
TEPCO|燃料デブリ ポータルサイト
https://www.tepco.co.jp/decommission/progress/fuel-debris/
https://www.tepco.co.jp/decommission/progress/retrieval/
Fukushima Reactor: TEPCO robot aims to extract nuclear fuel - IEEE Spectrum
https://spectrum.ieee.org/fukushima-reactor
東京電力は、福島第一原子力発電所の廃炉に向けて、約880トンに及ぶ核燃料デブリをロボットアームで取り出す計画を立てています。この計画自体は2017年4月から、国際廃炉研究開発機構(IRID)や三菱重工業、イギリスの原子力企業であるVeolia Nuclear Solutionsの共同開発で進められていました。
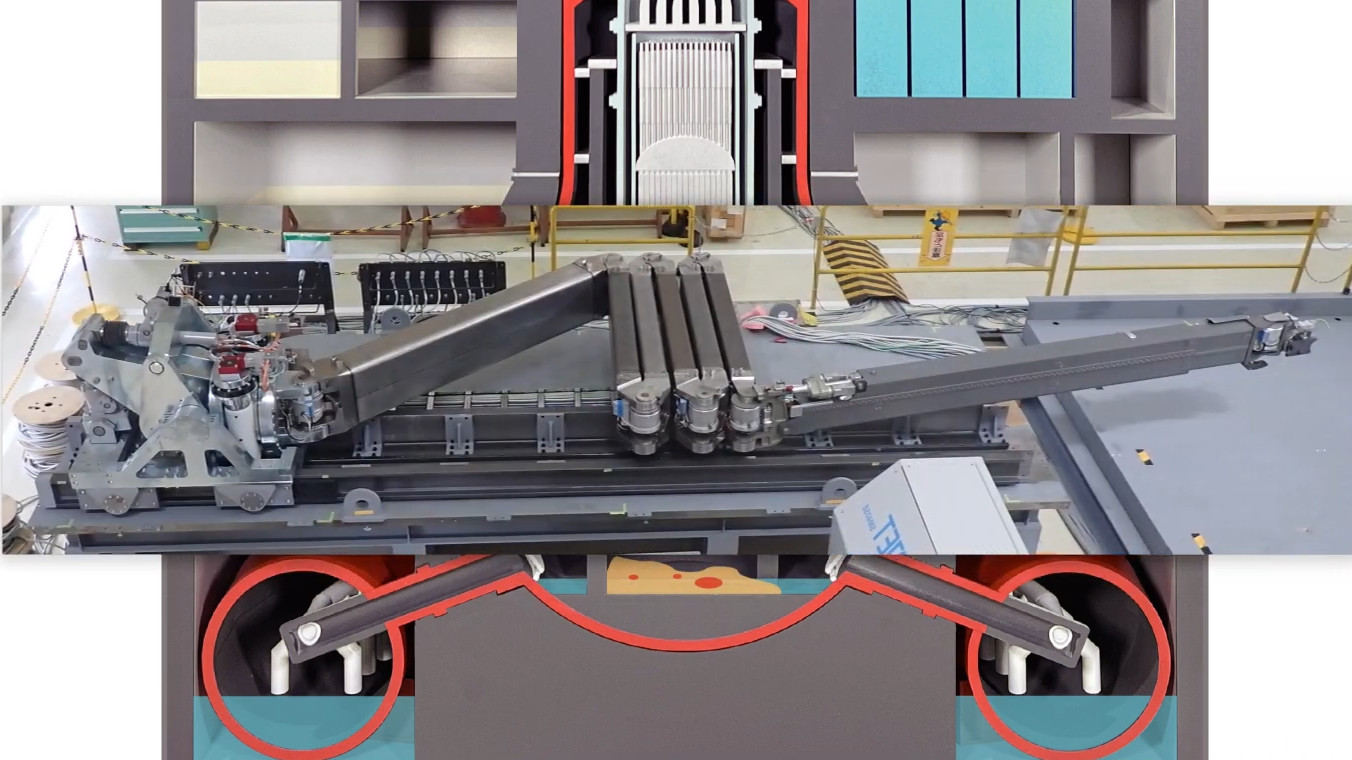
原子炉の一次格納容器(PCV)は電球を逆さまにしたような形状をしており、原子炉の圧力容器を収納する高さ33mの鋼鉄構造物です。計画では開発したロボットアームをPCVにつながる直径55cmほどの横穴から挿入し、核燃料デブリを取り出す手はずとなっていました。2019年に公開されたロボットアームは、以下のムービーで見ることができます。
原発溶融燃料取り出すロボットアームを公開 - YouTube
取り出し作業は2021年に開始される予定でしたが、新型コロナウイルスパンデミックによる作業の遅れ、さらには圧力容器直下にたまっている核燃料デブリに達するまで細い隙間を縫っていく必要があり、ロボットアームの性能が不足しているとして、3回の延期が重ねられました。
2024年時点で作業に使われる予定のロボットアームは、太さ20cmと16cmのパイプをつないで最大22mまで延びる釣りざお式の装置となっています。ステンレス鋼とアルミニウムでできており、重さは約4.6トンで、18自由度。アームの先端にはつり下げ式のグリッパ爪が取り付けられています。

手順としては、PCVの横に隔離室を設置した後に横穴を開けて、この穴を通してロボットアームを挿入。そしてグリッパ爪をつり下げて、下層に溜った核燃料デブリを取り出すという流れ。取り出された核燃料デブリは成分調査に送られます。

東京電力が公開している以下のムービーで、実際に核燃料デブリを取り出す手順が説明されています。
2号機燃料デブリ試験的取り出し作業について - YouTube
2024年8月、比較的他の原子炉よりも被害が少ない2号炉で核燃料デブリの取り出し試験が始まりました。しかし、パイプの接続ミスが発見され、作業は一時中断。その後、9月に作業を再開し、PCV内にある瓦礫(がれき)の一部をつかんだことを映像で確認しました。この瓦礫がデブリであるかどうかは不明です。
実際に2024年9月14日に実施された2号炉核燃料デブリの試験的取り出し作業のムービーは、以下のページで見ることが可能です。
動画アーカイブ|写真・映像ライブラリー|東京電力ホールディングス株式会社
https://www.tepco.co.jp/library/movie/detail-j.html?catid=107299&video_uuid=15441
しかし、直後にロボットアームの先端に取り付けられたカメラ映像の一部が遠隔操作室のモニターに適切に送られてこないことが判明し、作業は中断。線量の高いPCV内でカメラの電源を一度オフにしてしまったため、復活できなくなってしまったことが原因とみられています。
その後、東京電力は10月16日から一部カメラの交換作業を行い、カメラ映像が適切に遠隔操作室に送られていることを確認したと2024年10月21日に発表。核燃料デブリの試験的取り出し作業の再開時期は、すべてのカメラの交換作業が終了し、再開に向けた手順の確認が終わり次第発表されるとのことです。





